




OSVĚDČENÝ DODAVATEL
VÝROBNÍCH TECHNOLOGIÍ,
AUTOMATIZACE A ROBOTIKY
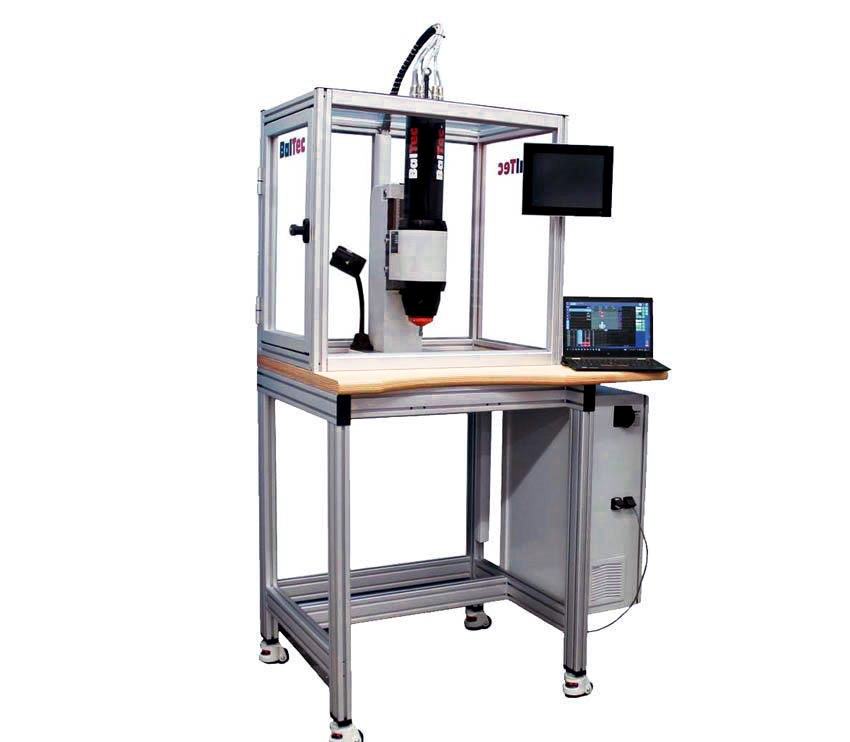
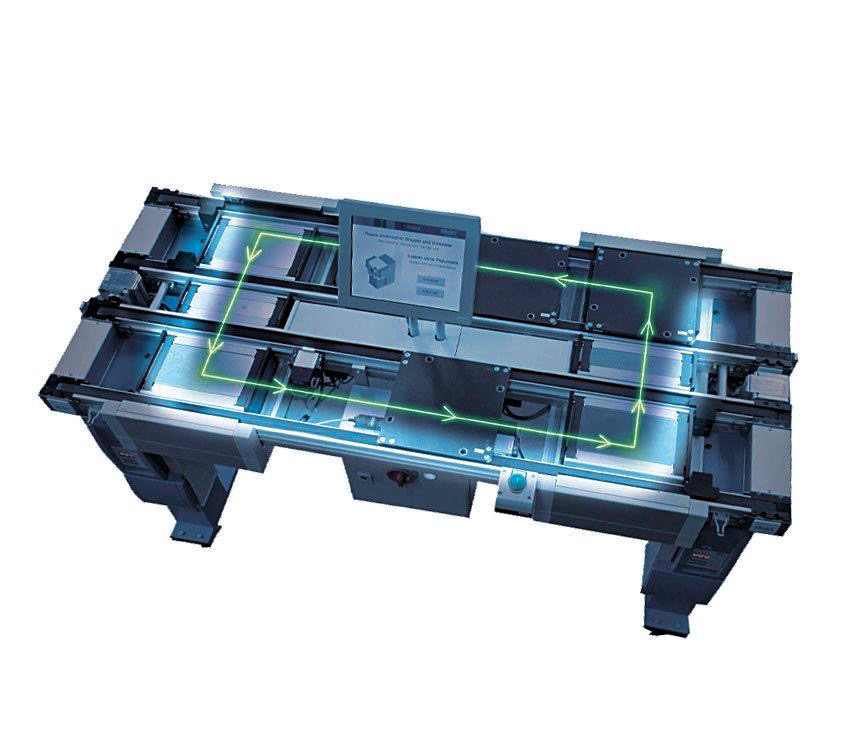
PRODUKTY PORTFOLIO










Online přístup k materiálům
...nám dovoluje poskytovat dokumenty
a další materiály ke strojům takřka obratem
Držíme skladem
... nejběžnější, nebo po domluvě i speciální,
náhradní díly ke všem našim strojům
Vždy aktuální informace
...od našich partnerů zaručují bezproblémový
průběh montáže a servisu strojů
SLUŽBY PODPORA



Aktuálně novinky





